









Trung Quốc phát triển robot khai khoáng vũ trụ đầu tiên
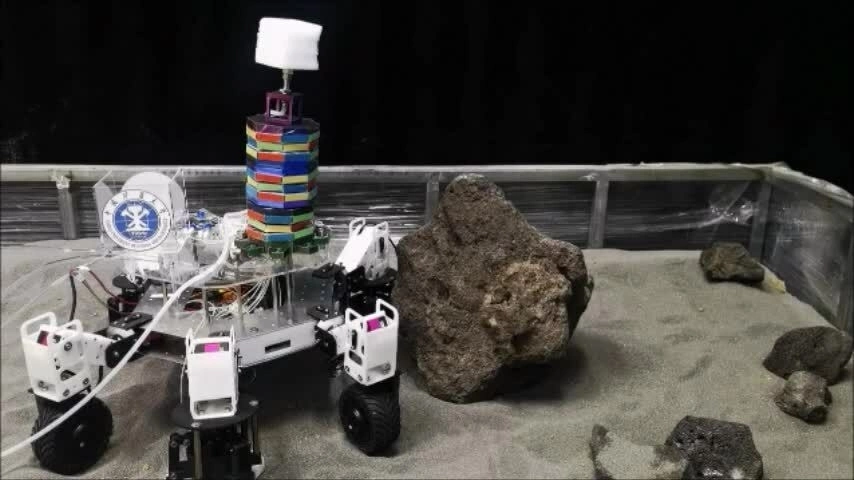
Nguyên mẫu robot khai khoáng vũ trụ của Đại học Mỏ và Công nghệ Trung Quốc. Video: Bastille Post
Nhóm nghiên cứu dẫn đầu bởi giáo sư Liu Xinhua tại Đại học Mỏ và Công nghệ Trung Quốc (CUMT) phát triển robot khai khoáng vũ trụ đầu tiên,ECNS hôm 16/3 đưa tin. Robot này có 6 chân,trong đó 3 chân gắn bánh xe và 3 chân gắn móng vuốt. Thiết kế này nhằm thích ứng với môi trường vi trọng lực ngoài không gian,đồng thời cho phép robot di chuyển qua địa hình gồ ghề.
Robot khai khoáng vũ trụ có nhiệm vụ thăm dò địa chất và thu thập khoáng sản trên các thiên thể ngoài Trái Đất,do đó cần có khả năng khoan. Dưới tác động của trọng lực Trái Đất,trọng lượng của robot đủ để hỗ trợ mũi khoan xuyên xuống. Tuy nhiên,trọng lực Mặt Trăng chỉ bằng 1/6 Trái Đất và các tiểu hành tinh thường cũng có trọng lực cực nhỏ,gây thách thức cho việc khoan xuyên bề mặt.
Để giải quyết vấn đề do vi trọng lực gây ra,nhóm nghiên cứu lấy cảm hứng từ cấu trúc móng vuốt và gai của côn trùng để trang bị cho robot khai khoáng các chân có móng vuốt chuyên dụng. Thiết kế móng vuốt giúp tăng khả năng bám trong môi trường vi trọng lực,cho phép robot tự ổn định để lấy mẫu,đồng thời điều chỉnh chuyển động theo địa hình.
Để giúp robot chống chọi tốt hơn với biến động nhiệt độ lớn,điều kiện chân không,bức xạ vũ trụ,hạn chế về trọng lượng và thể tích trên các thiên thể,nhóm nghiên cứu đã xây dựng một sân tập mô phỏng. Môi trường mô phỏng tái tạo bề mặt phong hóa của các tiểu hành tinh gần Trái Đất bằng cách dùng đất cát và ứng dụng hệ thống treo để mô phỏng các biến đổi vi trọng lực,theo Hua Dezheng,phó giáo sư từ CUMT. "Trong môi trường đất Mặt Trăng mô phỏng,robot có thể đi bộ,bám trụ,thậm chí thu thập mẫu",Liu nói.
Để thành thạo nhiều kỹ năng tiên tiến hơn,robot sẽ trải qua đào tạo nâng cao tại Phòng thí nghiệm trọng điểm về xây dựng thông minh,vận hành lành mạnh và bảo trì công trình dưới lòng đất sâu tại CUMT. Cơ sở này có thể mô phỏng những điều kiện khắc nghiệt trên bề mặt Mặt Trăng với độ chính xác cao. Hiện tại,nhóm nghiên cứu đã nộp đơn xin cấp bằng sáng chế nguyên mẫu robot khai khoáng vũ trụ cho các cơ quan liên quan và vượt qua những đánh giá ban đầu.
Thu Thảo (Theo ECNS)


 2025-03-17
2025-03-17